 |
Hauptsaechlich habe ich mich mit der Vermessung des Raumes beschaeftigt und hierzu zunaechst ein paar handelsuebliche orangene Katzenaugen an Pappkartons aufgehaengt im Raum verteilt. Dann habe ich unter groesserem Aufwand das Kernelmodul dahingehend abgeaendert, dass es mir die Winkel zwischen den Katzenaugen messen kann. Die Messwerte werden danach entschlackt (nur 1 Messwert pro Auge zaehlt, die restlichen resultieren aus der inhomogenitaet des Katzenauges) und somit auf eine relativ geringe Datenmenge reduziert, die auch ohne weiteres in akzeptabler Zeit uebers Funkgeraet uebertragbar ist. Ein grosses Problem war nun, die Reflektionen ansich zu erkennen. Meine seitherige Verstaerkerschaltung erwies sich als vollkommen untauglich; nach der Arbeit von ein paar Tagen hatte ich eine fertige Schaltung mit Operationsverstaerker statt Transistoren. Ungluecklicherweise haengte sich der Rechner aeusserst oft auf, dies jedoch immer nur dann, wenn er den Laser aktiviert hatte. Ich erkannte das Fehlen einer Diode am IRQ Eingang des Rechners... (beschaemend ..) Danach lief alles einigermassen zuverlaessig.
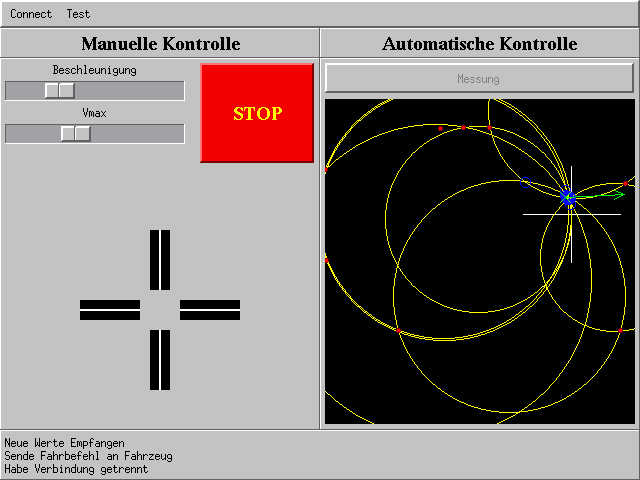
Ausserdem habe ich ein Programm zur grafischen Steuerung des Fahrzeuges geschrieben, da das Eingeben der Werte als Zahlen nicht sehr luxorioes ist. (Foto siehe unten) Das Programm habe ich dann um ein Abbild der Welt von oben erweitert. Eingezeichnet der Koordinatenursprung und die Katzenaugen. Man kann mit der Maus eine Position anwaehlen und das Fahrzeug faehrt diese an. Beim Erreichen derselben wird nachgemessen und korrigiert.
|
Einigen Kleinkram kann ich hier zwecks Vergessens nicht mehr niederschreiben und fasse daher besser einmal alles zusammen, was im Moment moeglich ist.

| 
|
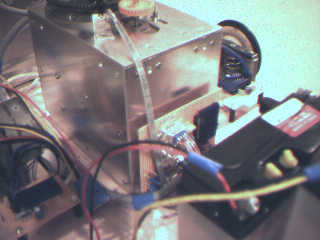
| Das Rotationsgeraet. Hier die hoffentlich endgueltige Version. Gut sichtbar ist oben die Gabellichtschranke. | Diesmal sieht man auch den am Zahnrad befestigten Unterbrecher |
| 
|
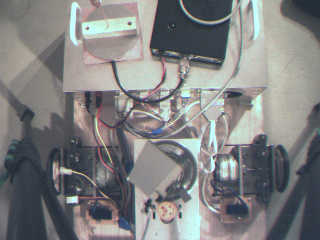
| Der 6V Bleiakku wird einfach viel zu schnell leer | Fahrzeug von oben. Schrittmotorsteuerungen sind mittlerweile festgeschraubt |
| 
|
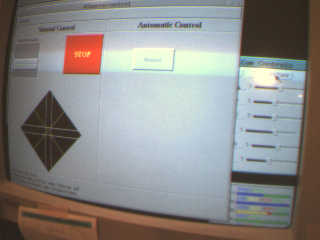
| Dies ist die Vorgaengerversion des Anwenderprogrammes. Hiermit war nur manuelle Kontrolle moeglich. | Die Schrittmotorsteuerung von nahem, sie besteht hauptsaechlich aus einem Siemens TCA 3727 Baustein, einigen Entstoerkondensatoren, und Bauteilen, die aufgrund ihrer zu grossen Leistungsaufnahme und Waermeentwicklung nicht integriert sind. |

| 
|
| Dies ist die am Rotationsgeraet befestigte Platine. Auf ihr befinden sich eine Schrittmotorsteuerung und ein Festspannungsregler, damit der Laser unabhaengig der stetig sinkenden Batteriespannung konstant hell leuchtet, und die Reflektionserkennungsschaltung (sie befindet sich im inneren des Gehaeuses) immer mit konstanter Spannung versorgt wird. Das urspruengliche Kabelwirrwarr habe ich durch ein neues kurzes Kabelbuendel ersetzt. Der obere Stecker fuehrt die 8 OUT Ausgaenge eines 8255 im inneren des Computers. 3 Bit werden davon pro Spule verwendet (eines zum Umpolen und die anderen 2 zur Regelung der Spannung). Ein bipolarer Schrittmotor hat 2 Spulen. Von den uebrigbleibenden 2 Bits wird eines zur Komplettabschaltung der Schrittmotorsteuerung und eines zum Einschalten des Lasers verwendet. Der mittlere Stecker fuehrt 0V, 6V und 12V. Der untere Stecker wird fuer die Reflexlichtschranke und den IRQ verwendet. | In dem blauen Klebeband ist die alles entscheidende Diode versteckt. |

| 
|
| Von der Positionierung der Batterien abgesehen ist dies in etwa der Endzustand des Fahrzeuges | Dieser Rechner hat zum Glueck auch wenn alle anderen mit Abstuerzen und Aufhaengen beschaeftigt waren niemals versagt und ersparte mir damit jegliche Datenverluste in Form des "Alles Umsonst" Effektes, wie er frueher gang und gebe war :) |
 |